学习笔记:一种的PID整定方法---Lambda整定法
- 2026-05-31 09:54:07
学习笔记:一种的PID整定方法---Lambda整定法



上一篇:PID参数调节的几种方法 下一篇:Sumlink中如何使用去尾均值滤波
Slight Snow
小雪
谈一谈我在实际调参过程中PID参数整定的方法,此方法是我使用最多,使用最好的一种方法,下面我将最简洁、最直观的分析给大家。
说明:Lambda整定是冯少辉老师提出的方法,能适用现场90%以上的PID整定,《PID参数整定与复杂控制》冯老师的这本书讲的特别好,我看了很多遍,下面只是把怎么用给大家说一下,原理还是多听一下冯老师的讲座(小编也想现场去听一次)与看上面提到的书。使用过后会发现这个方法现场实用性很强。这个是从冯老师书里面选择的最常用的一种情况(以下介绍可能不全面),大家自己斟酌学习,建议还是看《PID参数整定与复杂控制》。以下内容适用完全不会调节PID的,作为入门调试。
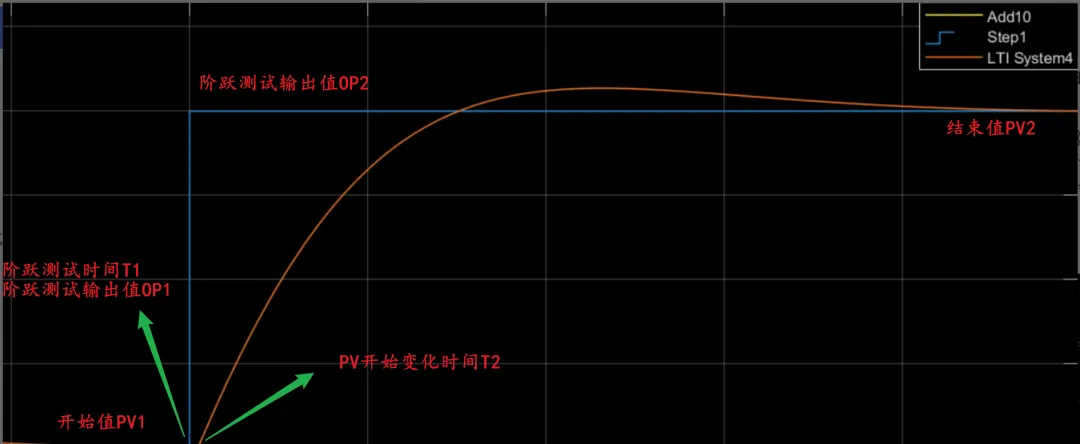
做阶跃测试得到以下图像
找到上述红色字体的所有参数:
▲PV=PV2-PV1
▲OP=OP2-OP1
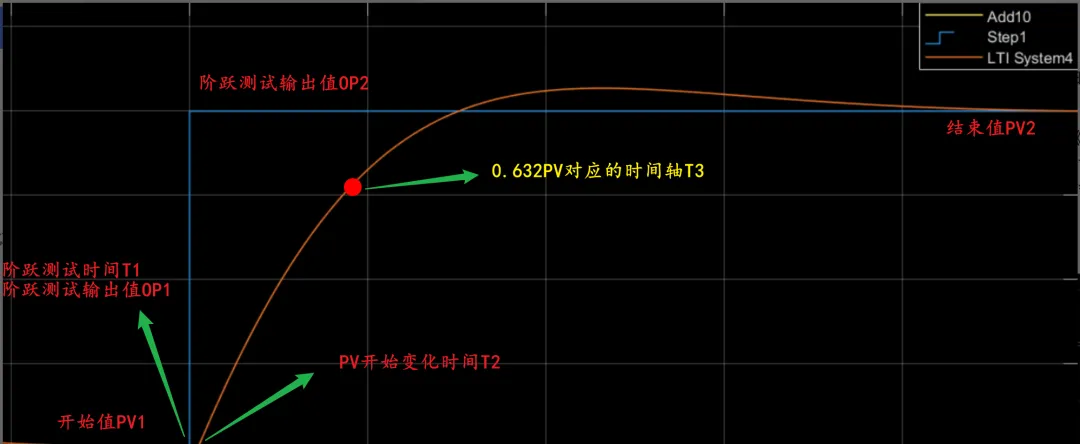
0.632PV=▲PV×0.632+PV1
在上面图形中找到0.632PV数字对应的时间T3
时间常数T=T3-T2
延时τ=T2-T1
K=▲PV/▲OP
Kc=T/(K×(τ+ʎ))
ʎ我一般取ʎ=τ或者ʎ=3τ(原理看《PID参数整定与复杂控制》)
上面就全部出来了P参数就是Kc,I参数为T(如果是系数通过T转换就行),D参数不用。
上面都是纯计算,适用现场逻辑写了PID但是不会调试的,想深入学习请看《PID参数整定与复杂控制》。
有不对的地方欢迎大家批评指正!!
春色先从草际归。
年华已伴梅梢晚,
疏帘红日弄朝晖。
小雪晴沙不作泥,
小白学自控
创作:小白学自控
文字:小白学自控
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

