尽管机器人辅助显微根尖手术在精度与稳定性方面展现出巨大潜力,但其广泛的临床应用仍面临着一系列技术与临床层面的多维度挑战。
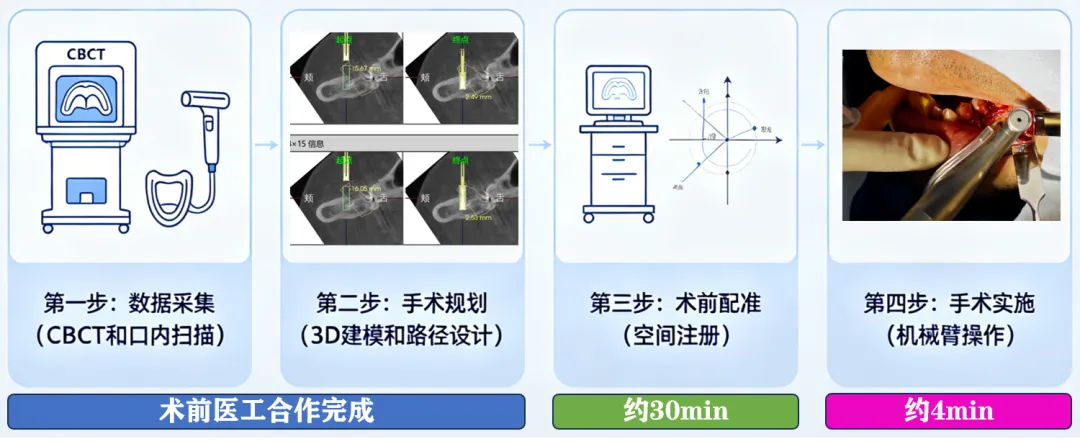
目前机器人辅助技术在集成与临床适配性能方面还有待提高,现有系统体积庞大,对诊室空间与无菌管理要求高;术前配准流程繁琐,显著延长了手术的总体时间。
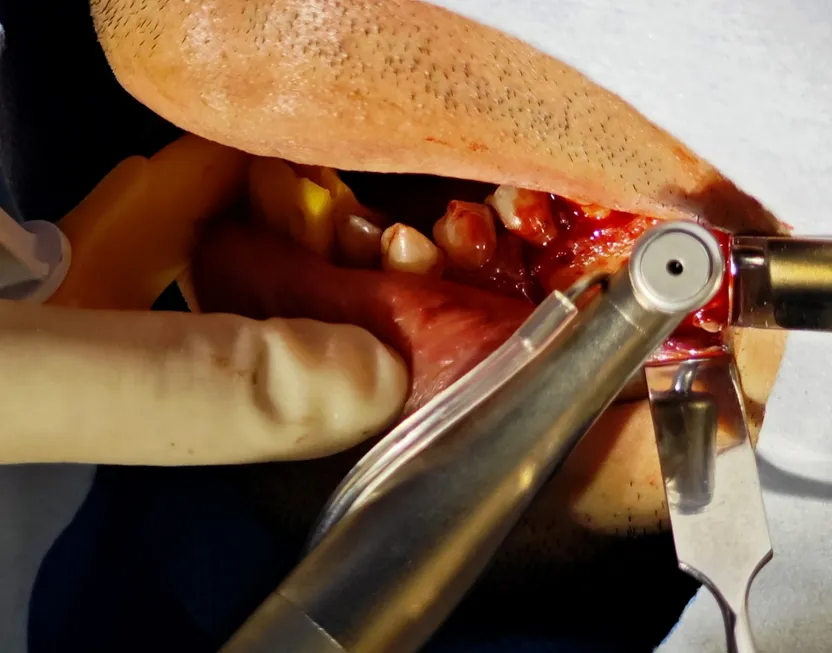
在技术执行层面,机械臂的刚性结构在狭小口内灵活性不足,且对患者张口度要求严格。目前器械兼容性局限于环钻,仅能辅助去骨与切除,后续根面修整、倒预备与倒充填仍完全依赖自由手,尚未实现手术全流程辅助。高级别临床证据依然匮乏,结论多基于体外研究或病例报告。软件的智能化不足,尚缺乏基于实时数据的决策支持与风险预警。此外,系统的实时动态跟踪与容错机制有待完善,对于术中突发状况的应对能力需进一步验证。
设备采购、维护及运营成本高昂,构成普及推广的主要经济障碍。目前其成本效益主要体现在复杂病例的疗效与安全性提升,而非常规手术的效率优化。
机器人辅助技术平台将不断向小型化、智能化与柔性化演进,硬件上开发更紧凑、集成设备,探索多自由度柔性机械臂以增强操作灵巧性;软件层面深度融合人工智能与增强现实(AR),实现术中实时数据处理、风险预警与虚拟信息叠加入真实术野,实现精准引导。手术流程也会向全周期集成解决方案不断拓展。未来机器人应成为覆盖全流程的智能平台,兼容超声工作尖等精密器械,集成视觉与力反馈系统,协助完成从开窗、根面修整到倒预备与材料递送的系列操作,推动手术全程数字化与标准化。Martinho等已为动态导航下的全流程辅助提供初步验证,为机器人技术发展提供参考。
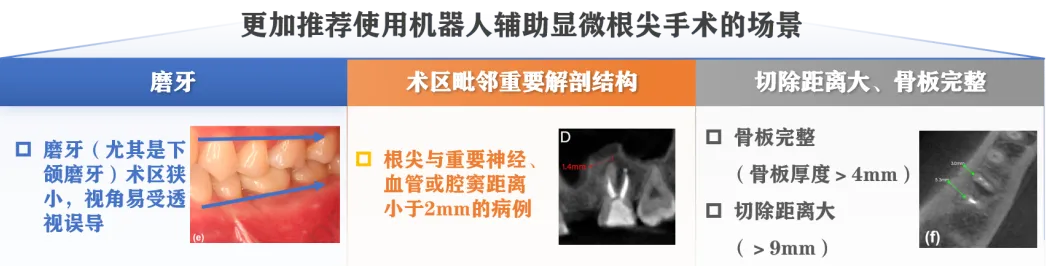
机器人辅助显微根尖手术正处在从技术验证走向临床成熟的关键阶段,机器人将不再仅是精准的执行工具,通过深度学习与多模态数据融合,机器人系统可构建个性化手术知识库,针对如紧邻神经管、上颌窦的磨牙,骨壁完整根尖位置深等的高难度病例提供实时导航、风险预警与决策支持,实现从“执行辅助”到“智能决策”的跨越,全面提升复杂根尖手术的诊疗水平。