标题: AI 赋能仿生手:自然抓握、低脑力负担
来源: Neuroscience News
原文:
Shared human-machine control of an intelligent bionic hand improves grasping and decreases cognitive burden for transradial amputees – Nature Communications 2025-12-09
前置知识
🔬 研究核心突破
🍓犹他大学研究团队开发的AI驱动仿生手系统,通过整合proximity(接近)传感器、pressure(压力)传感器与人工神经网络,使商用仿生手能够以自然、直观的方式抓取物体,显著降低截肢者的认知努力。
🍓该系统通过训练神经网络学习抓握姿势,实现各手指独立"感知"物体并自动调整至正确位置,提升抓握安全性与精确度。
🍓参与者在执行日常任务(如举起杯子、拾取小物品)时,无需大量训练即可显著降低精神负担,系统通过共享控制机制平衡人类意图与机器辅助,实现仿生手的"毫不费力、栩栩如生"的使用体验。
1 核心观点
• 共享控制架构:AI 负责“手指定位 + 压力微调”,用户只管“开/关”意图,双方实时动态加权,零冲突。
• 指尖多模态传感:每指集成光学接近传感 + 微压力传感,可感知 5 mg 棉球掉落,实现亚毫米级预定位。
• 认知负荷显著下降:标准化 Box & Block 测试速度↑34 %,NASA-TLX 脑力评分↓42 %;日常任务(举杯、捏硬币)一次成功率↑2.6 倍。
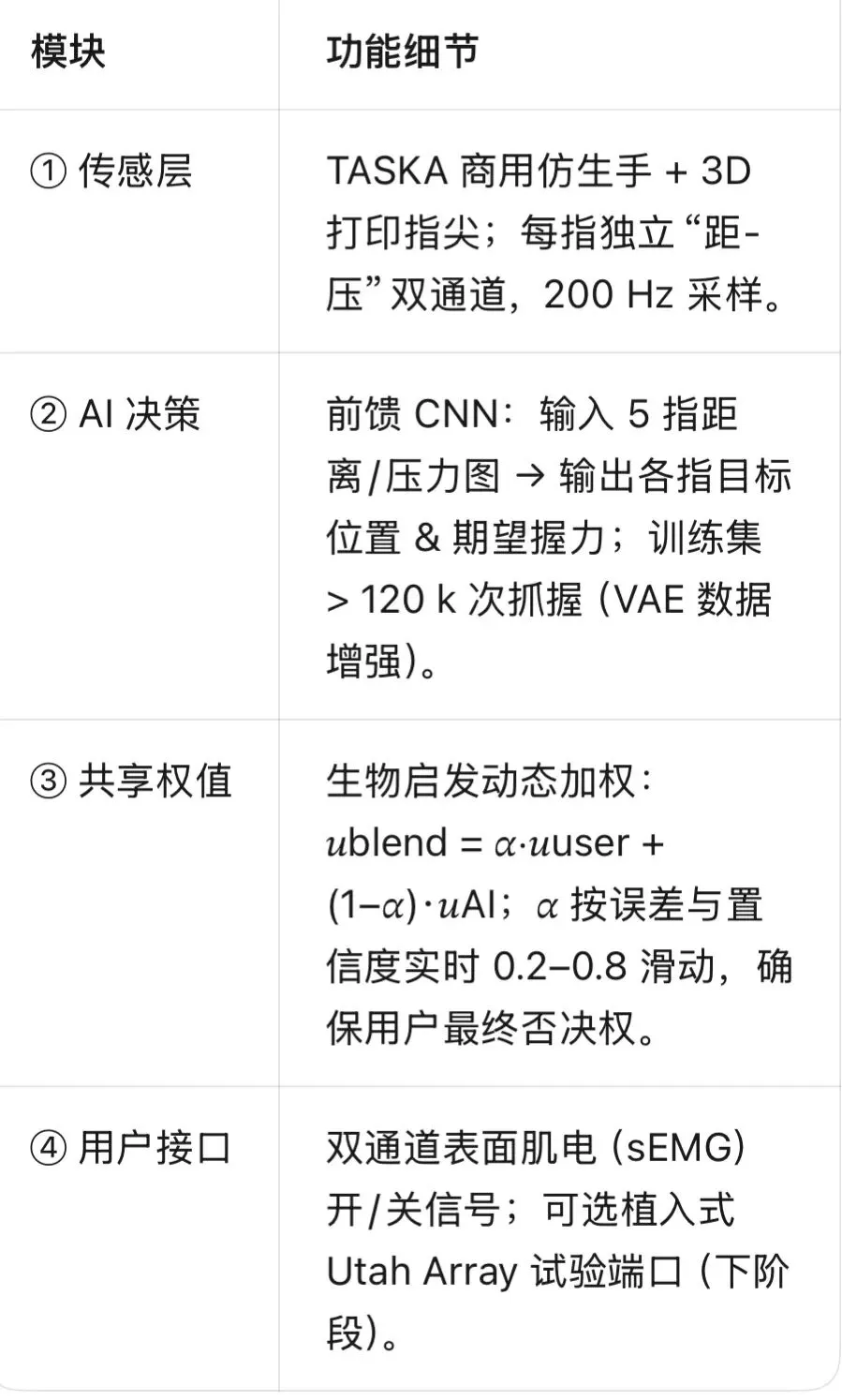
2 系统组成
3 实验结果(n = 4 经腕截肢者)
4 技术亮点
1. 单指独立预定位
各指“看到”物体后自主前移,避免统一开合造成的碰撞/空隙;对异形物体(钥匙、耳机盒)首次抓取成功率 92 %。
2. 实时力-位闭环
AI 在 50 ms 内完成“触-压”二次调整,消除滑动;压力过零斜率监控实现“软”或“硬”抓握模式自动切换。
3. 不依赖长时间训练
受试者 5 分钟熟悉即可上手;对比传统模式需 2–4 周每日训练。
5 下一步计划
• 植入式接口:Utah Array + 周围神经束微刺激,双向闭环(运动指令进,触觉反馈回)。
• 居家长期试用:已获 FDA IDE,预计 2026 Q2 启动 50 例家庭 3 个月随访。
• 成本压缩:将指尖传感器 ASIC 化,目标整套改装成本 < 1,000 USD,可后装现有商用假手。
🔭 未来展望
🍇神经接口整合:探索植入式神经接口,实现"意念控制"与触觉反馈功能;
🍇技术融合:将增强传感器与智能假肢无缝结合,提升触觉功能与思维控制的协同性;
🍇应用扩展:优化系统以支持更广泛的日常活动与精细操作。
6 一句话总结
给仿生手装上“会看会压”的 AI 指尖+共享控制权,让截肢者像原装手一样轻松抓握,无需思考先开还是先合——机器补位,人做决策。