在汽车电子和工业控制领域,CAN总线(Controller Area Network)几乎是嵌入式工程师绕不开的必修课。它用两根线构建了一个简洁、可靠、支持多主通信的网络,协议设计之精妙令人叹为观止。
第一章:物理层 —— 两根线上的差分哲学
在理解CAN如何传输数据之前,我们必须先把物理层的底子打牢。很多人学通信协议上来就盯着帧格式看,结果越看越糊涂,因为连电平怎么定义的都没搞清楚。
1.1 差分信号:为什么“0”比“1”强?
CAN总线使用两根线传输数据:CAN_H和CAN_L。它不是靠单根线的电压绝对值来判断0和1,而是看两根线的电压差。这一点和RS-485类似,但CAN在协议层面做得更完善。
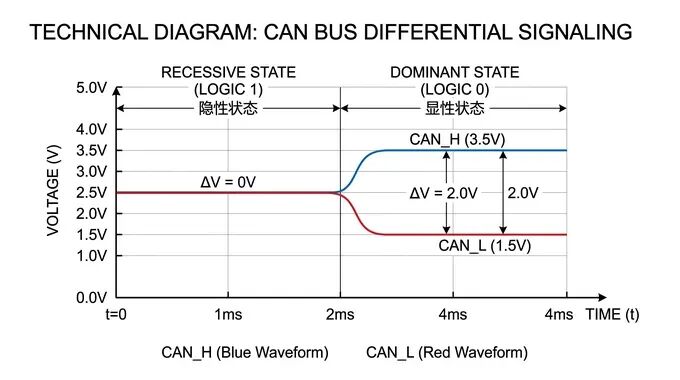
高速CAN(ISO 11898标准,速率125kbps~1Mbps)规定:
- 电压差为 0V 时,表示逻辑 1,也叫隐性电平
- 电压差为 2V 时,表示逻辑 0,也叫显性电平
这里有一个非常关键的物理特性,贯穿整个CAN协议的设计思想:显性电平(0)强于隐性电平(1)。什么意思呢?总线空闲时,两线电压被电阻拉到一致,呈现隐性状态(1)。任何一个设备想发送0,就必须主动“拉开”两根线的电压差。这就像两个人掰手腕,谁发力谁就能让总线变成0。后面要讲的仲裁机制,完全建立在这个物理基础之上。
【核心考点】
高速CAN:电压差0V = 逻辑1(隐性),电压差2V = 逻辑0(显性)。显性覆盖隐性,这是CAN非破坏性仲裁的物理根基。
1.2 终端电阻的奥秘:不只是防反射
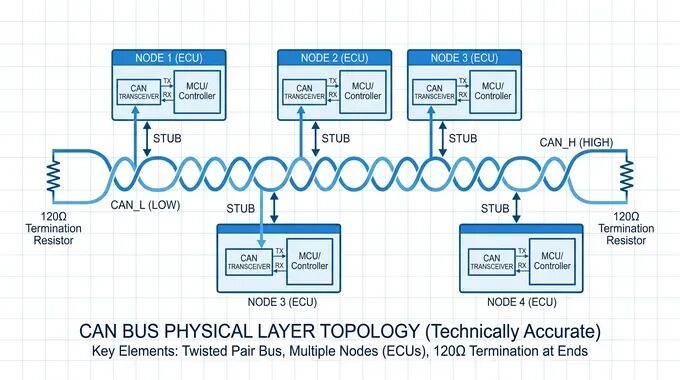
高速CAN采用闭环网络,在CAN_H和CAN_L的两端各接一个120Ω的终端电阻。很多资料只说“防止信号反射”,这没错,但不完整。实际上它有两个核心作用:
第一,在总线空闲时把两线收紧。 想象一根弹簧,没有外力时它是自然收紧的(隐性1状态)。当有设备要发送显性0时,就像用力拉开弹簧。120Ω的阻值越小,拉力越强,总线回到空闲状态的速度就越快。这个比喻非常形象,我第一次看到时就牢牢记住了。
第二,抑制高频信号的回波反射。 信号在导线末端如果遇到阻抗不匹配,会像声音遇到墙壁一样反射回来,干扰后续信号。120Ω终端电阻正好匹配CAN线缆的特性阻抗(典型值120Ω),把反射能量吸收掉。尤其在长距离通信时,没有这两个电阻,信号波形会严重畸变。
低速CAN(ISO 11519,10k~125kbps)则采用开环网络,只在其中一端接2.2kΩ的终端电阻,这是因为低速模式下对信号质量的要求没那么苛刻。
【核心考点】高速CAN:两端各120Ω终端电阻,作用①空闲时收紧差分电压②消除信号反射。低速CAN:一端2.2kΩ。
【记忆口诀】“高速双百二,低速单二二”
第二章:帧结构 —— 从SOF到EOF的完整旅程
理解了物理层,我们来看CAN总线上到底传输什么样的数据。CAN规定了5种帧类型:数据帧、遥控帧、错误帧、过载帧和帧间隔。其中最核心、最常用的是数据帧,我们就从它入手。
2.1 数据帧的解剖:每个段都有它的使命
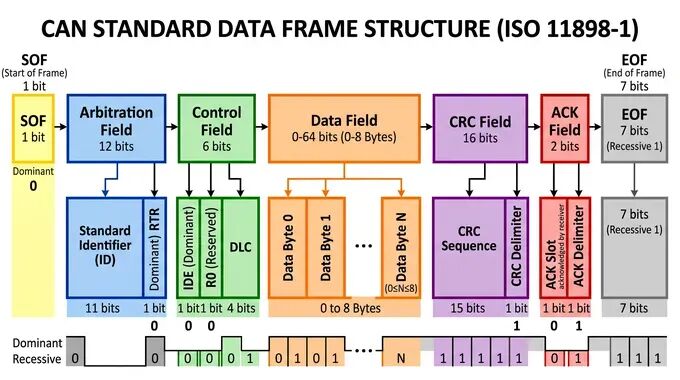
数据帧由7个段组成。我按照它们在总线上出现的先后顺序逐一讲解,每一个都有它存在的理由。
- ① SOF(Start of Frame,帧起始)——1位显性0
总线空闲时持续保持隐性1。为了让所有设备知道“数据传输开始了”,发送方拉一个显性0。这个从1到0的跳变沿,不光是起跑信号,还是后面要讲的硬同步的触发点。 - ② 仲裁段(ID + RTR)
这是CAN协议最精妙的部分。仲裁段包含报文ID(标准格式11位,扩展格式29位)和RTR位(远程请求位)。ID决定了两件事:消息的功能和发送优先级。ID值越小,优先级越高。注意这里是二进制逐位比较,所以0x000的优先级最高。RTR在数据帧中必须是显性0,在遥控帧中为隐性1。这意味着相同ID下,数据帧的优先级自动高于遥控帧——因为0强于1。
【核心考点】标准格式ID:11位,范围0x000~0x7FF。扩展格式ID:29位,范围0x00000000~0x1FFFFFFF。
【核心考点】ID越小优先级越高。数据帧(RTR=0)优先级高于遥控帧(RTR=1)。仲裁段就是“ID+RTR”。
- ③ 控制段(IDE + r0 + DLC)
IDE位区分标准格式(0)和扩展格式(1)。r0是保留位,必须为显性0。DLC(Data Length Code)占4位,指示数据段有几个字节,取值范围0000~1000(即0~8个字节)。注意DLC最大只能是8,因为CAN一帧最多传8字节数据。 - ④ 数据段——0~64位(即0~8字节)
这是真正的有效载荷。发送时高位先行,每个字节的MSB先出去。数据段是CAN帧里最“自由”的部分,你想传什么就传什么,但长度不能超过8字节。对于长数据,需要上层协议(比如CANopen、J1939)来分包。 - ⑤ CRC段
发送方根据前面的数据计算出一个15位的CRC校验值,接收方收到后自己也算一遍,对不上就说明数据传错了。CRC段后面跟一个CRC界定符(必须是隐性1),它的作用是给后面的ACK腾出时间——你想,如果界定符是显性0,紧接的ACK也是显性0,那接收方怎么区分“CRC结束”和“应答开始”?所以协议强制规定这个界定符为隐性1。 - ⑥ ACK段——最精妙的握手机制
ACK段包含两个位:ACK槽(ACK Slot)和ACK界定符。发送方在ACK槽发送一个隐性1,然后释放总线控制权。所有正确收到数据的接收方必须在ACK槽位置发送一个显性0,把总线拉低。发送方回读总线电平,如果读到0,说明至少有一个接收方正确收到了;如果读到1,说明没人收到,产生ACK错误。ACK界定符同样是隐性1,用于分隔。这个设计非常巧妙:允许多个接收方同时应答,因为大家都发0,线与之后总线还是0,不会冲突。发送方只需知道“有人收到了”,不需要知道具体是谁。
【核心考点】ACK槽:发送方发1,接收方成功则拉0覆盖。发送方回读到0=发送成功,读到1=ACK错误。这是硬件自动完成的,软件层面只需检查发送状态位即可。
- ⑦ EOF(End of Frame)——7位隐性1
帧结束的标志。7个连续的隐性1之后,再跟3位帧间隔(也是隐性1),总共连续11个隐性位。这个数字要记住:任何设备检测到总线连续11位隐性电平,就认为总线空闲,自己可以尝试发送了。
2.2 遥控帧:发起一次请求
遥控帧和数据帧的结构几乎一样,唯一的区别:RTR位为隐性1,且没有数据段。DLC在遥控帧中仍然存在,但它指的不是实际数据长度,而是“请求的数据长度”。
遥控帧的使用场景是:设备A需要某个ID的数据,就发一个遥控帧出去。设备B如果持有这个ID的数据,就用一个数据帧回复。但注意,如果A发遥控帧的同时B正好也在发同ID的数据帧,数据帧优先级更高(因为RTR=0强于RTR=1),B会赢得仲裁。
2.3 位填充:藏在波形里的定时时钟
CAN是异步通信,没有独立的时钟线。为了让接收方能持续校准采样时机,协议规定了一个位填充规则:发送方每连续发送5个相同电平,就必须自动插入一个相反电平的填充位。接收方检测到5个相同位后,会自动移除紧跟的那个填充位,还原原始数据。
位填充有三大作用:
1. 提供定时信息——防止长时间无电平跳变,接收方无法同步
2. 区分错误帧/过载帧——错误帧和过载帧是连续6个相同位,正常数据流最多连续5个相同位,一旦出现6个,说明出事了
3. 防止误判总线空闲——如果数据里有连续11个1,会被误以为总线空闲,填充位打破了这种可能性
【核心考点】位填充规则:每5个相同电平后插入一个相反电平的填充位。CRC计算和校验时忽略填充位。连续6个相同位 = 错误帧或过载帧的标志,这是区分正常数据与异常的关键。
第三章:仲裁、同步与容错 —— CAN的立体防御体系
如果说帧结构是CAN的骨架,那么仲裁机制、位同步和错误处理就是它的神经系统。这三者协同工作,让CAN在恶劣的电磁环境中依然稳定可靠。
3.1 非破坏性仲裁:逐位PK,败者自动退场
多个设备同时想发数据怎么办?CAN采用非破坏性仲裁,也叫CSMA/CA(载波侦听多路访问/冲突避免)。过程非常简单却精巧:
设备每发送一个位,立即回读总线电平。因为显性0强于隐性1,如果自己发1却读到0,说明有其他设备发了0,自己仲裁失败,立即转入接收状态,不干扰胜出者继续发送。直到整条消息发完,失败的设备再等下一次机会。
这里有一个容易被忽略的细节:位填充也参与仲裁。也就是说,发送方在仲裁段如果遇到5个相同位,也会插入填充位。但这不会改变ID的优先级,因为填充规则对所有人一视同仁。真正决定胜负的,仍然是ID本身的值。
优先级规则总结如下(从高到低):
1. 标准数据帧(11位ID,RTR=0)
2. 标准遥控帧(11位ID,RTR=1)
3. 扩展数据帧(29位ID,RTR=0)
4. 扩展遥控帧(29位ID,RTR=1)
标准格式ID的高11位若与扩展格式ID的高11位相同,标准格式优先级更高。原因在于扩展格式在RTR位之后有一个SRR位(替代远程请求位),它必须为隐性1,在仲裁时会被标准格式的IDE位(显性0)击败。
【核心考点】非破坏性仲裁核心:逐位比较+回读。发1读0=仲裁失败,立即退出不干扰胜者。优先级排序:标准数据帧 > 标准遥控帧 > 扩展数据帧 > 扩展遥控帧。
【记忆口诀】“标数标遥扩数扩遥,ID越小越靠前”
3.2 位同步:没有时钟线,全靠自己对齐
CAN没有时钟线,波特率由所有设备预先约定。但晶振总有误差,时间一长采样点就会偏移。CAN用两种同步方式解决这个问题。
为了精确调整采样位置,CAN把每个数据位细分为4个时间段(以最小时间单位Tq计):
- 同步段(SS)——固定1Tq,期望的电平跳变应发生在SS内
- 传播时间段(PTS)——补偿信号在总线上的传播延迟
- 相位缓冲段1(PBS1)——用于调整采样点,可被再同步拉长
- 相位缓冲段2(PBS2)——用于调整采样点,可被再同步缩短
采样点位于PBS1和PBS2的交界处。波特率计算公式:
波特率 = 1 / (SS + PTS + PBS1 + PBS2)
硬同步只发生在SOF的下降沿。当接收方检测到帧起始的跳变时,立即将自己的位时序计数器“拨”到SS段的位置,完成首次对齐。每个数据帧只有一次硬同步机会。
再同步在之后每个数据位的跳变沿都可能发生。如果检测到跳变沿不在SS段内,说明时钟有偏差。接收方会根据SJW(同步跳转宽度)补偿:若自己跑快了,拉长PBS1;若自己跑慢了,缩短PBS2。SJW规定了单次调整的最大幅度,防止噪声引起的误调整。
【核心考点】硬同步:仅触发于SOF下降沿,强制对齐到SS段。
【核心考点】再同步:后续每个跳变沿触发,通过拉长PBS1或缩短PBS2微调。
【核心考点】SJW:同步跳转宽度,限制单次调整的最大Tq数,防止噪声干扰。
3.3 错误处理:5种错误与3种状态
CAN定义了5种错误类型:
1. 位错误——发出去的位和读回来的不一致(仲裁段和ACK段除外)
2. 填充错误——连续6个相同电平出现在需要位填充的段
3. CRC错误——接收方算出的CRC和收到的CRC不一致
4. 格式错误——固定格式位段出现非法电平(如CRC界定符为0)
5. ACK错误——发送方在ACK槽未检测到显性0
任何设备检测到错误后都会发送错误帧(连续6个显性位),破坏当前传输,让所有设备都知道出错了。
每个设备内部维护两个计数器:TEC(发送错误计数器)和REC(接收错误计数器)。根据计数值,设备处于三种状态之一:
- 主动错误状态(TEC<128且REC<128):正常通信,检测到错误时发送主动错误帧(6个显性位,能破坏总线)
- 被动错误状态(TEC≥128或REC≥128):仍可通信,但检测到错误时只能发送被动错误帧(6个隐性位,不会破坏总线)
- 总线关闭状态(TEC≥256):设备彻底退出通信,必须检测到128次连续11位隐性位后才能重新上线
这个设计非常巧妙:一个频繁出错的设备会被逐渐“降级”,从能破坏总线的主动状态降为只求自保的被动状态,最终被踢出总线。这保证了单个故障节点不会拖垮整个网络。
【核心考点】5种错误:位错误、填充错误、CRC错误、格式错误、ACK错误。
【核心考点】3种状态:主动错误(TEC<128,REC<128)→被动错误(TEC≥128或REC≥128)→总线关闭(TEC≥256)。
【核心考点】错误帧识别标志:连续6个显性位(主动)或6个隐性位(被动)。
结语:CAN的精髓在于“克制”
回顾CAN协议的整个设计,你会发现它处处体现了“克制”二字:没有时钟线,用位填充自同步;没有主设备,用无损仲裁公平竞争;没有中央监控,用分布式错误检测共同维护总线健康。两根线,构成了一个完美的自治系统。理解了CAN,再去学CANopen、J1939等上层协议,就会发现有了坚实的根基。愿这份梳理能帮你在嵌入式通信的道路上更进一步。
📋 核心知识点速查表
| 电平定义 | ||
| 终端电阻 | ||
| 仲裁机制 | ||
| 位填充 | ||
| ACK机制 | ||
| 错误状态 | ||
| 位同步 |