PID控制器依赖偏差来得到控制量,为了加快系统达到稳定,可以加入前馈环节
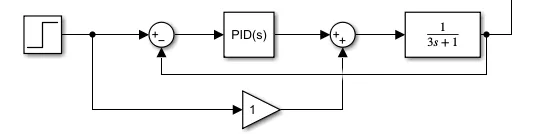
设要控制的系统传递函数为1/(3s+1),一个简单的前馈如下图,就是先向系统加上指令值乘以一个系数,在下图闭环系统中,系数为1就是先向该系统输入1,相当于在调节初期提高了控制量,考虑到系统为开环时向该系统输入1,则在稳态后输出1,加入这个前馈只会让稳态时从PID模块出来的值为0,不会产生稳态误差。
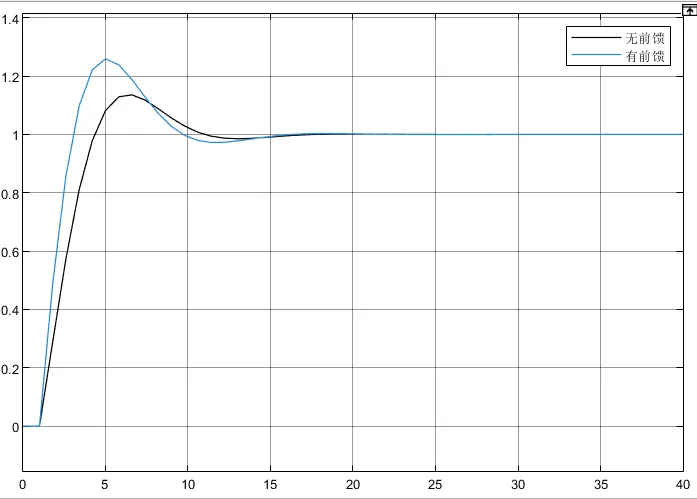
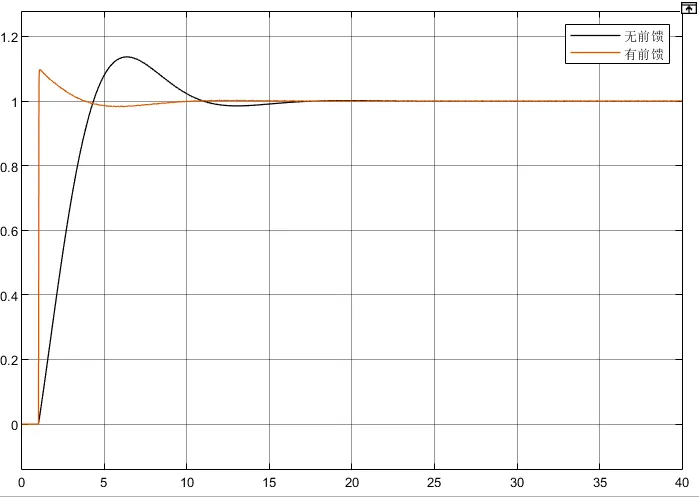
在相同的PI控制器下对比有无前馈时的响应如下,可以看到由于前馈在初期加入了一个值,超调会大
可以优化该“系数”项,根据参考[2],先看误差传递函数,令分子项为0,得到对于惯性环节G=k/(Ts+1),前馈函数的“系数”项为传递函数(Ts+1)/k,恰好为系统传递函数的倒数,这并不是偶然,因为误差为0即系统的输出Y等于指令信号R,考虑到输入系统的控制量U与Y间满足Y=GU,因此若要输出R,则输入U应等于G^(-1)R。对于这个案例,前馈如下图
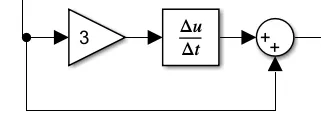
不过似乎没有体现出前馈的优势
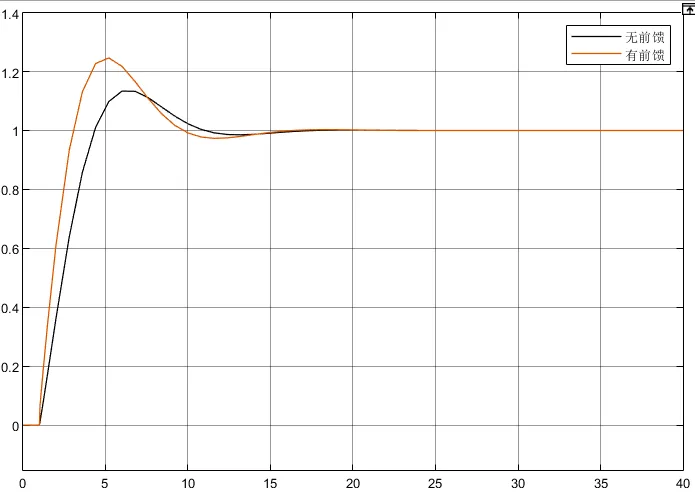
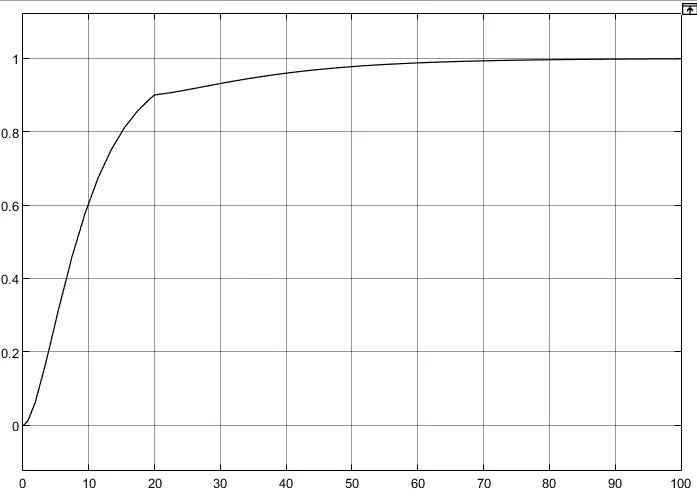
这是因为涉及微分环节,而阶跃信号的微分为无穷大,在阶跃信号后接一个时间常数很小(0.01)的惯性环节作为滤波器,再次仿真,可以看到输出信号立刻上去,且调节时间也很短。
以上是对参考信号的前馈,前馈也可以针对干扰信号,这在涡轴发动机中很常用
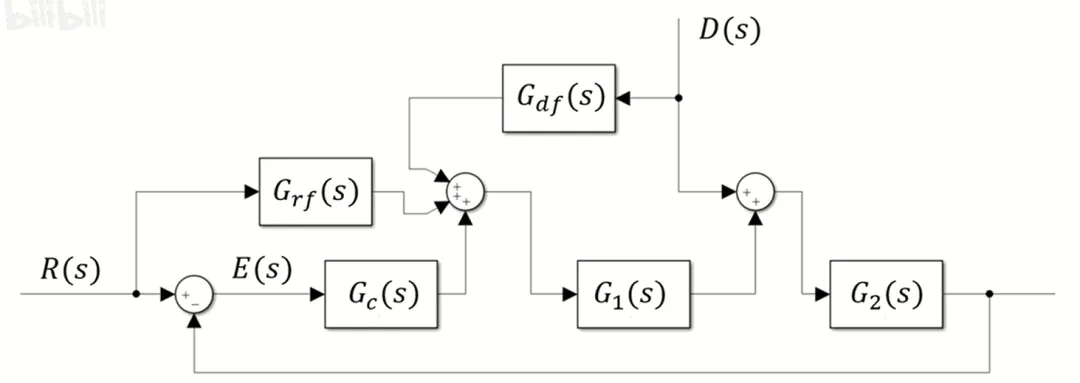
根据[2],两个前馈表达式为

设G1和G2都是1/(3s+1),则Grf(s)要求两次微分,这在实际中会很慢。
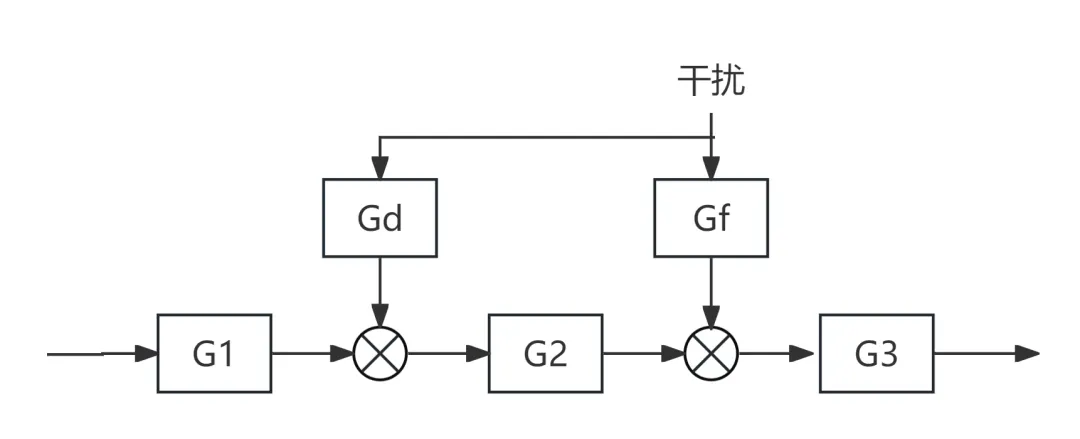
参考[1]给出如下的,Gd为前馈传递函数,显然Gd=-Gf/G2时可以抵消干扰
参考例9-6给出各个传递函数,模型如下
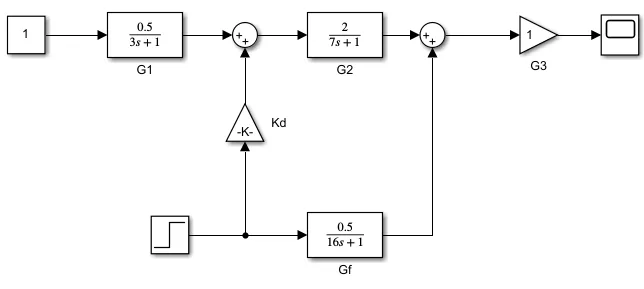
不过现实情况是没有这么明确的传递函数,且考虑到对于高阶系统的前馈传递函数难以避免微分项,因此[1]将Gd项简化为常数,还在214页给出了工程整定的方法,就是逐渐调整Kd使系统的输出回到指令值。书里给出此时Kd=-0.25,此时响应如下图,当然由于只有前馈,此时系统的响应还是很慢。
参考
1. 王正林,郭阳宽.MATLAB/Simulink与过程控制系统仿真[M].北京:电子工业出版社,2012.例9-6
2. 只用PID?加上前馈解决95%的问题!_哔哩哔哩_bilibili
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
