本期全流程拆解:从0到1,实战不缺位
本期分享将完全遵循“实战逻辑”,拆解4个核心模块,每个模块都结合具体操作,拒绝“纸上谈兵”,全程围绕真实卫星影像(Sentinel-2 数据集,可免费获取)展开,确保大家跟着操作就能完成一次完整的遥感影像分类任务。
模块1:遥感影像数据源获取与预处理(GIS核心环节)
数据是实战的基础,而遥感影像的预处理,直接决定了后续模型训练的效果——这也是GIS工程师的核心优势所在。很多新手入门失败,大多是因为忽略了预处理的细节。
本期我们会重点讲解3个关键步骤,全程结合ArcGIS Spatial Analyst扩展模块与Python实操:
1. 数据源获取:推荐免费可商用的卫星影像(Sentinel-2、Landsat-8),下载地址:
ESA Copernicus Open Access Hub:Sentinel系列影像专属下载平台,包含注册、检索、筛选的完整操作步骤
USGS EarthExplorer:覆盖Landsat、Sentinel-2等多类影像,详细讲解按区域、时间筛选影像的操作方法
AWS Sentinel-2存储库:全球实时数据镜像,重点讲解批量下载技巧,提升影像获取效率。
注意:影像筛选技巧:明确筛选标准(云量≤10%、波段完整),避开“无效波段”“坐标异常”等常见坑,附带筛选参数设置示例,直接参考即可使用。实操配套检索参数:Sentinel-2影像检索关键词、区域范围参数,复制即可快速找到目标影像,无需手动设置。
2. 核心预处理操作:辐射定标(将灰度值转换为实际物理量)、大气校正(消除大气干扰,还原地物真实反射特性)、几何校正(纠正影像几何变形,确保空间坐标准确),这三步是遥感影像分类的“地基”,缺一不可。
3. 数据优化:影像增强(直方图均衡化、对比度拉伸)、波段合成、数据集划分(按7:3比例划分训练集与测试集),同时讲解如何用Python批量处理影像,提升效率,避免手动操作的繁琐与误差。
这里会避开复杂的GIS工具操作冗余步骤,只讲核心流程和关键参数,同时提供批量处理的简化代码(带详细注释),即使是Python新手也能轻松上手。比如遥感影像批量读取与波段合成的核心代码预览:
# 导入必备库(GDAL用于读取遥感影像,numpy用于数据处理)from osgeo import gdalimport numpy as npdef batch_merge_bands(input_dir, output_path, target_bands=[2,3,4]): """ 批量读取遥感影像,合成指定波段(以Sentinel-2的2、3、4波段为例,对应蓝、绿、红波段) input_dir: 遥感影像文件夹路径 output_path: 合成后影像保存路径 target_bands: 需合成的波段索引(从1开始) """ # 读取文件夹内所有tif影像(假设为单波段影像) import os tif_files = [f for f in os.listdir(input_dir) if f.endswith('.tif')] tif_files.sort() # 按波段顺序排序,避免波段混乱 # 初始化输出数组(获取影像尺寸,用于存储多波段数据) ds = gdal.Open(os.path.join(input_dir, tif_files[0])) width = ds.RasterXSize height = ds.RasterYSize num_bands = len(target_bands) output_data = np.zeros((height, width, num_bands), dtype=np.float32) # 批量读取指定波段并写入输出数组 for i, band_idx in enumerate(target_bands): # 读取对应波段的影像文件(此处需根据实际文件名规则调整) band_file = [f for f in tif_files if f.endswith(f'B{band_idx}.tif')][0] ds_band = gdal.Open(os.path.join(input_dir, band_file)) # 读取波段数据,存入数组(维度:高×宽×波段) output_data[:,:,i] = ds_band.ReadAsArray() ds_band = None # 释放资源 # 保存合成后的多波段影像 driver = gdal.GetDriverByName('GTiff') out_ds = driver.Create(output_path, width, height, num_bands, gdal.GDT_Float32) out_ds.SetGeoTransform(ds.GetGeoTransform()) # 保留原始空间坐标 out_ds.SetProjection(ds.GetProjection()) # 保留原始投影信息 for i in range(num_bands): out_band = out_ds.GetRasterBand(i+1) out_band.WriteArray(output_data[:,:,i]) out_band.FlushCache() ds = None out_ds = None print(f"多波段合成完成,保存路径:{output_path}")# 示例调用(直接修改路径即可运行)if __name__ == "__main__": input_dir = r"E:\Sentinel2\raw_data" # 原始单波段影像文件夹 output_path = r"E:\Sentinel2\merged\merged_bands.tif" # 合成后影像路径 batch_merge_bands(input_dir, output_path, target_bands=[2,3,4])
这段代码可直接复制运行,注释清晰标注了每一步的作用,新手只需修改输入输出路径,就能完成遥感影像的批量波段合成,后续模型训练的核心代码也会按此风格提供,确保大家能快速上手。
模块2:CNN模型入门与搭建(AI核心环节)
很多朋友对CNN的恐惧,源于“复杂的网络结构”——其实对于遥感影像分类,我们不需要搭建复杂的深层网络,入门级的CNN架构(如LeNet、简单CNN)就足够满足需求,重点是理解“卷积、池化、全连接”的核心作用。
本期会用最通俗的语言拆解:
1. CNN核心原理:为什么卷积能提取影像特征?池化的作用是什么?全连接层如何实现分类输出?用遥感影像的场景举例,避免抽象难懂的理论;
2. 模型搭建实操:用PyTorch框架搭建入门级CNN模型(全程带代码,每一行都有注释),讲解网络层数、卷积核大小、激活函数的选择逻辑,结合遥感影像的维度特点(多波段、空间分辨率),调整模型参数,避免“照搬代码却跑不通”的问题;
3. 关键参数解读:学习率、批次大小、训练轮数的设置技巧,以及如何根据自己的硬件条件(CPU/GPU)调整参数,避免训练过慢或过拟合。
同样,这里也给大家预览入门级CNN模型搭建的核心代码(PyTorch框架,适配多波段遥感影像):
# 导入PyTorch相关库,用于模型搭建和训练import torchimport torch.nn as nnimport torch.optim as optimclass SimpleCNN(nn.Module): """ 入门级CNN模型,适配遥感多波段影像分类(以4波段影像为例) 网络结构:卷积层×2 + 池化层×2 + 全连接层×2 """ def __init__(self, in_channels=4, num_classes=4): """ in_channels: 输入影像的波段数(如Sentinel-2合成4波段,此处设为4) num_classes: 分类类别数(如建筑、道路、绿地、水体,共4类) """ super(SimpleCNN, self).__init__() # 第一组卷积-池化:提取浅层空间特征 self.conv1 = nn.Conv2d(in_channels, 32, kernel_size=3, padding=1) # 卷积核3×3, padding=1保持尺寸不变 self.relu = nn.ReLU() # 激活函数,增加非线性 self.pool = nn.MaxPool2d(kernel_size=2, stride=2) # 最大池化,缩小特征图尺寸,减少参数 # 第二组卷积-池化:提取深层空间特征 self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1) # 全连接层:将卷积提取的特征映射为分类结果 self.fc1 = nn.Linear(64 * 32 * 32, 128) # 输入维度需根据影像尺寸调整(此处假设输入64×64,池化后32×32) self.fc2 = nn.Linear(128, num_classes) # 输出维度=分类类别数 def forward(self, x): """前向传播:定义影像数据在网络中的流动过程""" # 卷积→激活→池化 x = self.pool(self.relu(self.conv1(x))) x = self.pool(self.relu(self.conv2(x))) # 展平特征图:从(batch, 64, 32, 32)转为(batch, 64×32×32) x = x.view(-1, 64 * 32 * 32) # 全连接层→激活 x = self.relu(self.fc1(x)) # 输出分类结果(无需激活,后续用CrossEntropyLoss计算损失) x = self.fc2(x) return x# 模型初始化示例(直接运行即可生成模型)if __name__ == "__main__": # 初始化模型(输入4波段,分类4类) model = SimpleCNN(in_channels=4, num_classes=4) # 定义优化器(Adam优化器,学习率0.001,常用参数) optimizer = optim.Adam(model.parameters(), lr=0.001) # 定义损失函数(适用于多分类任务) criterion = nn.CrossEntropyLoss() # 打印模型结构,查看是否符合需求 print(model)
代码中关键参数(如输入波段数、分类类别数、卷积核大小)都可根据实际数据调整,注释明确标注了调整逻辑,可直接替换参数适配自己的数据集。
这里会特别注意“GIS与AI的结合”——比如如何将预处理后的遥感影像(多波段)适配CNN模型的输入格式,解决“影像维度与模型输入不匹配”的常见问题。
模块3:模型训练与调优(实战核心难点)
模型搭建完成后,训练与调优是提升分类精度的关键。很多新手会遇到“训练不收敛、精度上不去、过拟合”等问题,本期会针对性解决这些痛点,全程实战演示:
1. 训练过程实操:将预处理后的数据集导入模型,设置训练参数,用tqdm可视化训练过程,实时查看损失值、准确率的变化,判断训练是否正常;
2. 常见问题解决:针对“过拟合”(加入Dropout层、数据增强)、“训练不收敛”(调整学习率、优化器)、“精度偏低”(调整模型结构、增加训练数据)等问题,给出具体的解决方案,结合实例演示调整过程;
3. 优化技巧分享:如何利用迁移学习(如ResNet预训练模型)快速提升精度、减少训练时间,适合数据量较少的场景,这也是实际工作中常用的技巧。
模块4:分类结果评估与可视化(GIS+AI融合收尾)
模型训练完成后,不是结束——还要评估分类效果,并用GIS工具可视化,让结果更具实用性。这一步能体现出GIS工程师的独特优势,也是AI工程师容易忽略的环节。
本期会讲解:
1. 核心评估指标:准确率、召回率、F1分数、混淆矩阵的解读,教大家如何通过这些指标判断模型的分类效果,找到分类错误的地物类别;
具体来说,
准确率是所有分类结果中判断正确的样本占总样本的比例,是最直观的整体评价指标,但要注意,若某类地物样本占比极高,即便其他地物错分严重,准确率也可能偏高,容易误导判断;
召回率则是某一类真实地物中,被模型正确识别出来的比例,重点衡量“不遗漏目标地物”的能力,比如遥感影像中的水体样本,若召回率低,就意味着部分水体被漏分,可能影响后续的水资源核查等工作;
F1分数是准确率和召回率的调和平均数,能综合两者优势,解决单一指标的片面性,分数越接近1,模型表现越均衡,适配遥感地物分类的实际需求;
混淆矩阵则是排查错分问题的核心工具,以矩阵形式直观呈现每类地物的分类情况,行代表真实地物类别,列代表模型预测类别,对角线是正确分类的样本数,非对角线则是错分的样本数,通过它能一眼找到错分最严重的地物类别,为后续优化打下基础。
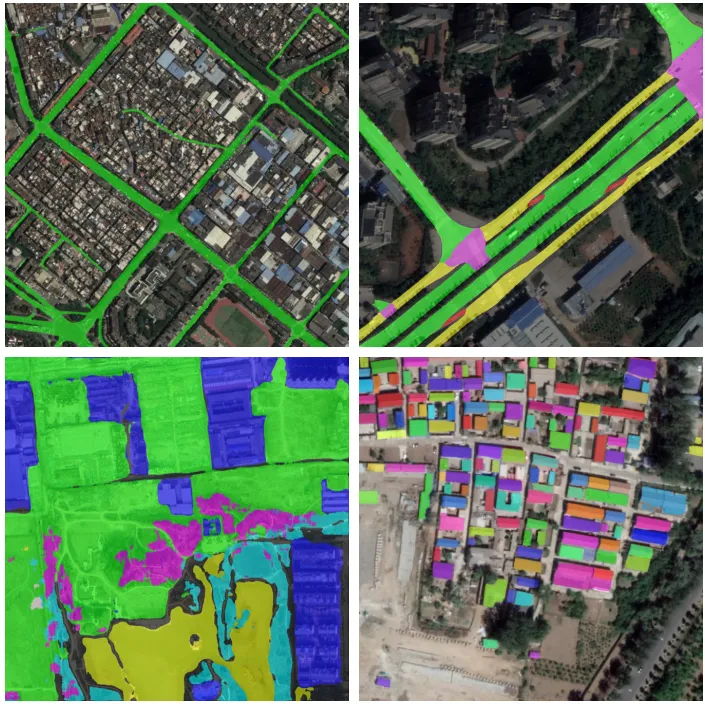
2. 结果可视化:将CNN分类后的结果,导入ArcGIS中,结合原始遥感影像、矢量边界,制作分类专题图,添加图例、坐标、比例尺,满足实际项目汇报、成果展示的需求;
3. 成果优化:如何修正分类错误区域,提升结果的实用性,以及如何将分类结果导出为常用的GIS格式(如shp、tif),方便后续的空间分析。
适合谁看?避开无效学习
1. 从事GIS相关工作,想入门空间深度学习、拓展AI技能的工程师;
2. AI从业者,想了解遥感影像应用场景,拓展空间AI方向的学习者;
3. 高校相关专业(GIS、遥感、地理信息、人工智能)的学生,想提升实战能力,为就业铺垫;
4. 对空间深度学习、遥感影像分类感兴趣,想从0到1掌握实战流程的爱好者。
⚠️ 注意:本期分享会假设大家具备基础的GIS知识(如影像基础、ArcGIS基本操作)和简单的Python基础(如变量、函数),如果完全零基础,建议先回顾前两期的基础内容,再跟着本期实战操作,效率会更高。
本期福利与预告
下一期,我们正式开启实操环节,从遥感影像数据源获取开始,一步步推进,期待和大家一起,把技术落地到实战中,真正实现“GIS+AI”的融合应用~
关注我,不迷路,一起深耕GIS与AI交叉领域,解锁更多实战技能✨
文末互动:你在遥感影像分类或CNN学习中,遇到过哪些棘手的问题?评论区留言,下期实操中,我会针对性讲解解决方案!